VR触覚デバイス「HaptXグローブ」の開発で知られるスタートアップ企業HaptXは、バージニア工科大学・フロリダ大学とともに研究・開発を進めているプロジェクト「ForceBot」が150万ドル(約1億6,000万円)の助成金を獲得したと発表しました。助成金はアメリカ国立科学財団(National Science Foundation、NSF)が提供しています。


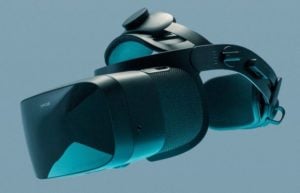
(HaptX社による「全身ハプティクスシステム」のコンセプトイメージ)
全身の触覚をVRで再現
HaptXと2大学が進めている「ForceBot」は、ロボット外骨格とマイクロ流体触覚フィードバックを組み合わせた、企業向けの全身力触覚ソリューションの実現を目的とするプロジェクトです。
デバイス装着者がVR空間内の物体を感じるだけではなく、全身の動作のフィードバックを受けながらVR空間内を移動できるようにすることが目標で、初期のVRアプリケーションには産業スキル・緊急時の対応・プロスポーツ向けのトレーニングなどが含まれると予想されています。
HaptXはすでに同名の触覚グローブ「HaptX」を開発しており、2019年には日産が同社との共同開発で力触覚の再現まで含めたVRシミュレーションを導入したり、英国の医療VRスタートアップFundamentalVRと提携し、外科医がVR研修用に装着できる手術用手袋を開発したりしています。

研究の主目的は産業利用
全身の力触覚再現というと、映画「レディ・プレイヤー1」に登場する全身VRスーツのような、エンタメ用途をイメージするかもしれません。ですが、同プロジェクトが視野に入れているのは主に産業用途で、ロボットやコボット(Collaborative Robot、協業ロボット)、人間が装着する外骨格など、人間とロボットがインタラクションするシステムが期待されています。
具体的には、全身力触覚デバイスを装着したユーザーがリモートでロボットを操作し、ロボットが受ける感触や反動などを“体感”しながら作業を行えるようにするシステムなどです。

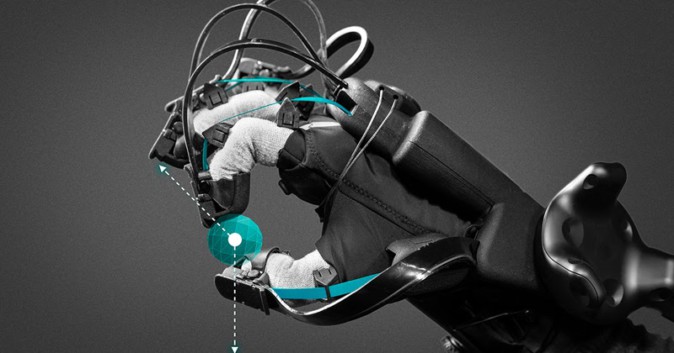
(HaptX社が開発する、下半身外骨格の初期プロトタイプ)
今回の150万ドルの助成金はForceBotプロジェクトに対する4年間の資金の総額です。研究者たちは、同プロジェクトがVR環境における世界初の全身力触覚フィードバックシステムになると考えています。