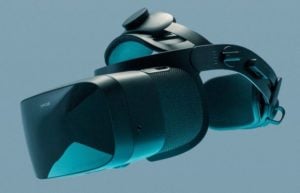
東京大学と慶應義塾大学は、科学技術振興機構(JST)などの支援を受け、複数人での動作や技能共有のための遠隔共同作業システム「Fusion(フュージョン)」を開発しました。ロボットヘッドとロボットアームを搭載し、ロボットアームの装着者とVRヘッドセットを使用してロボットアームなどを遠隔操作する2名で、「二人羽織」のような共同作業を可能とします。従来のテレイグジスタンスやMRデバイス技術だけでは難しかった、視点共有を伴った共同作業を実現しています。

共同作業に必須の身体的なコミュニケーション
共同作業を通じた技能や知識の伝達においては、身体的な情報と紐づいたコミュニケーションが重要な役割を果たします。その際には「他人の視点になること」や「言葉に加え、ボディランゲージなど身体的なやり取り」、そして「学習者の手を引くなどの誘導」といった動作が発生します。しかし、互いが離れた場所にいる場合はこれらの情報が乏しくなるため、コミュニケーションや共同作業は難しくなります。
この研究では上記の問題を解決するために、離れた他者の「視点を共有する」ことに着目。身体を動かす度合いに応じて、Directed(直接的な共同作業)、Enforced(動きの指示)、Induced(動きの誘導)の3つの状況を想定した遠隔共同作業システム「Fusion」を開発しました。
視点を共有し、遠隔共同作業
本システムは、二人羽織のようなウェアラブルロボットシステムによって身体的な情報を伴ったコミュニケーションを生み出し、操作者と装着者はほぼ同一の視点から見ている空間を共有します。
システムの構成は、操作者側と装着者側に分かれます。操作者側はVRヘッドセットをつけ、装着者のシステムにアクセスします。一方装着者が身に着けたバックパックには、3軸で回転するロボットヘッドと、回転・移動のできる人型ロボットアームを搭載されています。アーム先端のロボットハンドは取り外し可能で、別のアタッチメントを付けることもできます。またバックパックはバッテリー駆動のため持ち運びが可能で、屋外でも使用が可能とのこと(図2)。
このシステムでは、身体を介した3つのタイプのコミュニケーションが可能です。Directedタイプでは、ロボットハンドを使用した共同作業ができます。Enforcedタイプは、アタッチメントを手首用のバンドに取り換えることで、装着者の手先の位置や姿勢を動かすことができます。Inducedタイプでは、ロボットアームで装着者を引っ張ることで、狙った方向に歩行を誘導することができます。
(図1:システムの構成)

(図2:屋外での使用例)
これまでのシステムの限界
これまでにも複数人による視点の共有によって遠隔共同作業を支援する研究はいくつか行われています。全方向カメラで他人の視点を再現し、状況を共有可能にする研究や、MRを使ってコミュニケーションを支援する研究などです。しかし、このようなシステムは手軽な方法である一方、身体動作を伴う遠隔共同作業には向いていません。
今回の研究はこうした既存の制約に対して、可搬性と直感的な操作性を備えた遠隔共同作業システムを開発しました。
なお本研究の成果は、2018年8月12日にカナダのバンクーバーで行われる国際学会「SIGGRAPH 2018」にて発表します。さらに今後は、本システムによる遠隔共同作業性能の向上や技能学習のためのプラットフォームを開発する予定です。
(参考)科学技術振興機構プレスリリース